【ニュース・トピックス】 2019.11.29
【REPORT 1】北九州学術研究都市フォーラム「生産性向上・テクノロジーイノベーション」 研究交流会2 〜ソフトロボットによる人間の労働や生活機能の支援〜
“いい加減”な技術が“好い加減”に処理!
強くて優しい「ソフトロボット」に秘められた可能性
東京工業大学工学院 鈴森康一 教授
2019年10月30日、31日に北九州学術研究都市で行われた「生産性向上・テクノロジーイノベーションフォーラム」。31日11時15分から行われた九州工業大学主催の研究交流会2では、「ソフトロボットによる人間の労働や生活機能の支援」と題し、東京工業大学の鈴森康一教授と九州工業大学の柴田智広教授が登壇しました。
鈴森教授は、ソフトロボットや「細径(さいけい)マッキベン人工筋」を使った、「人口減少社会における生産性向上・テクノロジーイノベーション」に関する開発事例を発表。ソフトロボットが果たす役割、そしてその技術に活かされている「細径マッキベン人工筋」とは、一体どのようなものなのでしょうか?

Profile
東京工業大学工学院 鈴森康一 教授
1990年横浜国立大学大学院工学研究科博士課程修了。1984年〜2001年に株式会社東芝勤務、1999年〜2001年に財団法人マイクロマシンセンターに勤務。2001年〜2014年に岡山大学教授、2014年より東京工業大学教授に着任。新学術領域研究「ソフトロボット学」の領域代表を務め、人工筋肉やアクチュエータといわれる駆動装置の研究に携わっている。ベンチャー企業の株式会社s-muscle、H-MUSCLE株式会社の各代表取締役も兼務。
「ソフトロボット学」の研究の一例を紹介する鈴森教授
従来の“ダメロボット”が世の中の救世主に!?
これまでのロボット学は、速度、力、精度、確実性に重点を置いて研究が行われてきました。結果、工業用ロボットやロケットなどが開発されましたが、一方で赤ちゃんを抱きしめるなど、簡単にできるはずの作業を行うロボットがいまだに出てきていません。そこで着目されているのが“やわらかさ”。機械・電子工学ではやわらかい電子回路、機械材料科学ではゲルの3Dプリンタや生体由来の材料、情報科学ではAIや脳型情報処理と、ここ10年で“やわらかさ”をキーワードにした技術が、様々な分野で誕生しています。鈴森教授が携わる「ソフトロボット学」も、この“やわらかさ”がキーワード。融通、適応、E-kagen(好き加減)という価値観に基づき、新たなロボティクスを作る研究が行われています。
この研究について鈴森教授は、「従来のロボット学の価値観からするとダメ技術。力をかけるとたわんでしまうようなロボットアームは、なんて“いい加減”な機械設計なのだと言われていました」と振り返ります。しかし「これらの“いい加減な技術”は、物事を“好い加減に処理”してくれます」と鈴森教授。この“好い加減に処理する”ことこそが、ソフトロボットのメリットなのです。
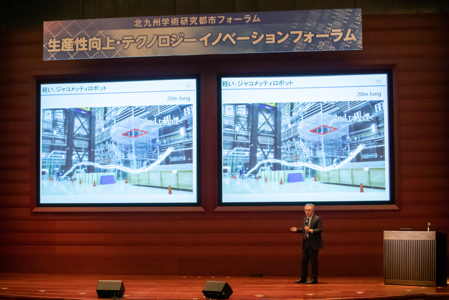
「細径マッキベン人工筋」で動く「ジャコメッティロボット」
軽くて細い「細径マッキベン人工筋」の可能性
鈴森教授の研究で鍵となる技術が、自身が開発に携わった「細径マッキベン人工筋」と呼ばれる人工筋肉。1940年代にドイツで発明された「マッキベン人工筋肉」をさらに細かくしたもので、同じく空気圧で動作し、非常に軽いのが特徴です。鈴森教授の研究室では、「細径マッキベン人工筋」で動くアーム型のソフトロボット「ジャコメッティロボット」を開発。アームを20m以上伸ばすことができ、災害時には操縦者が安全な場所にいながら、現場の危険性や生存者を探すことができます。「従来のロボット学だと、どこに穴が空いているか、どこに障害物があるかなどをすべてモデル化する必要がありました。しかしジャコメッティロボットは、前に進ませるだけで状況を把握できます」と鈴森教授。さらに軽量のため簡単に運び出せ、万が一、人の上に落ちても怪我をさせる可能性が少ないなど、まさに“好い加減に処理”してくれるロボットです。
もっとも、軽さゆえのデメリットもあります。鈴森教授が「力が弱くてカメラを持つのが精一杯」と語るように、まだ実用化には至っていません。しかし研究が進めば、人が近づけないような災害現場において、強力な助っ人となるに違いないでしょう。

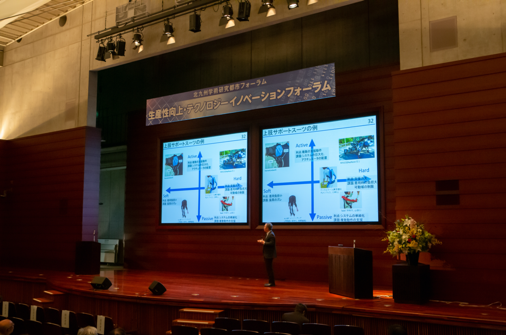
腰部の筋負担軽減、椎間板への圧縮力低減が可能な「下股サポートスーツ」
人工筋肉を使ったサポートスーツで力持ちに!
「細径マッキベン人工筋」のもう一つの特徴として、収縮率が高く、繊維化できることが挙げられます。鈴森教授の研究チームは、「細径マッキベン人工筋」を使用した「下股サポートスーツ」を開発中。商品化されると、重い荷物を運ぶといった重労働の負担軽減が期待されます。フォーラムでは、ある工場の作業員を対象に行なった評価試験の結果を発表。鈴森教授が「筋電評価による客観評価試験では、スーツを着用しているのとしていないのとでは、脊柱起立筋の表面筋への負担が最大17%、平均12%減少しました。アンケートによる主観評価試験でも、腕や足の負荷が減ったという声が寄せられました」と語るように、一定の評価が得られています。しかし「締め付けられるなどの違和感も寄せられました」と、まだ改良の余地があることも事実のようです。
さらに鈴森教授の研究チームは、腕をサポートする「上股サポートスーツ」の開発も手がけています。木の上に実った果物の収穫など、手を上げた状態での作業負担の軽減を想定。すでに表面筋電位の測定では、筋肉の負担が軽減することが実証されています。「石膏型の和紙による転写や、伸縮素材と非伸縮素材を組み合わせることで、体表面変化に即した装具を目指しました」と語る鈴森教授。しかしながら「手を引っ張るとスーツがずれ、皮膚と骨が動くため、体を動かしているつもりでも、スーツが体に密着せずにうまく動作しないことがあります。また、脱ぐとホッとするという意見もありました」と、「下股サポートスーツ」と同様、装着感の課題が残されています。
チャンドラーの小説の一節を紹介する鈴森教授
強くて優しいロボットの実用化を目指して
「細径マッキベン人工筋」は、医療現場におけるリハビリやコミュニケーション支援にも希望をもたらします。鈴森教授は、「細径マッキベン人工筋」を使った、エコノミー症候群などによる下肢の血栓防止装置についても紹介。さらに、脊髄性筋萎縮症により体を思うように動かせないコメディアンが、“動く服”を着て芸を披露する様子も紹介しました。
このように、災害や作業の現場だけでなく、医療・障碍支援での社会貢献も期待される「ソフトロボット学」。鈴森教授は、「コンピュータの誤作動で急に力が強くなる可能性もあり、いまだソフトロボットが安全だとは言い切れません。力を安全にコントロールできる技術が必要です」と今後の課題を示しました。
そして最後に、レイモンド・チャンドラーの小説「プレイバック」に登場する一節を引用。“強くなければ生きていけない。優しくなければ生きていく資格がない”。「ソフトロボット学」の研究理念にも通じるこの言葉を胸に、強くて優しいロボットの誕生に向け、鈴森教授の研究はまだまだ続きます。
